- Diffusion Posterior Sampling 방법과 Diffusion plug-and-play method에 대해 이론적, 실험적 비교를 위한 post
- DPS 논문 리뷰
[논문 리뷰] DPS: Diffusion posterior sampling for general noisy inverse problems
[논문 리뷰] DPS: Diffusion posterior sampling for general noisy inverse problems
[논문]Diffusion posterior sampling for general noisy inverse problemsICLR 2023Citations: 737[https://arxiv.org/abs/2209.14687]Diffusion model을 통해 inverse problems을 해결하는 가장 기초적인 methodGeneral forward model$n\sim N(0,\sigma^2I)$
kongshin00.tistory.com
- DPnP 논문 리뷰
[논문 리뷰] DPnP: Provably Robust Score-Based Diffusion Posterior Sampling for Plug-and-Play Image Reconstruction
[논문]Provably Robust Score-Based Diffusion Posterior Sampling for Plug-and-Play Image ReconstructionNeurIPS 2024Citations: 15https://arxiv.org/abs/2403.170420. AbstractGoal: known forward model로 부터 얻은 small number of noisy measurements를 통
kongshin00.tistory.com
[DPS]
- Classifier guidance와 동일하게 bayes’ rule를 사용하여 uncond.부분과 $p(y|x_t)$를 통해 posterior sampling 진행
- $\nabla_{x_t}logp(x_t|y)=\nabla_{x_t}logp(x)+\nabla_{x_t}logp(y|x_t)$
- $p(y|x_t)$를 $p(y|\hat x_0)$로 approx.하여 general forward model의 첫 posterior sampler 제안
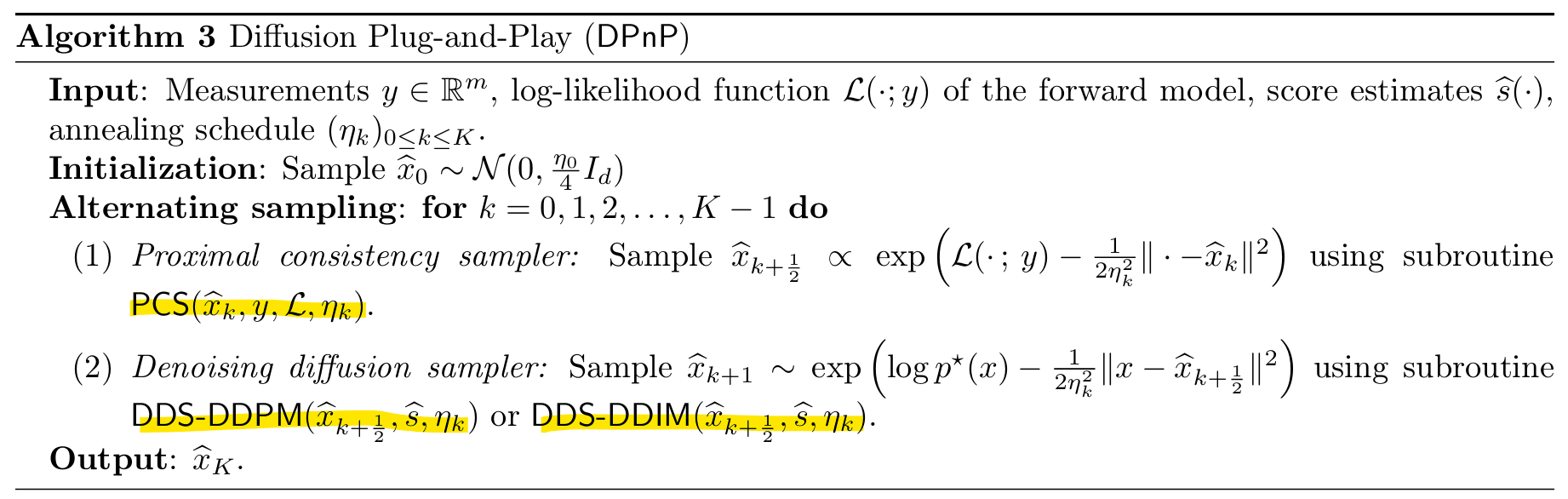
[Denoising posterior sampler DDS (DPnP)]

- data x를 low-dim manifold $\mathcal M$에 위치시킴 ⇒ $logp^\star(x)=-\infty, x\notin\mathcal M$
- 기존 Algorithms들은 proximal operator에서 conditional expectation map을 사용
-



- $p(x^\star|x_{noisy})$를 계산할 때 $x^\star$에 대한 가중평균 형태로 계산
- $\mathcal M$이 nonlinear할 경우, $\mathcal M$에 떨어진 point를 생성할 수 있음 ‘
- ⇒ prior constraint 위반하여 reconstruction quality 저하
-
- ⇒ but DDS는 $p^\star(x)$에서 직접 sampling하기 때문에 prior constraint를 더욱 잘 유지
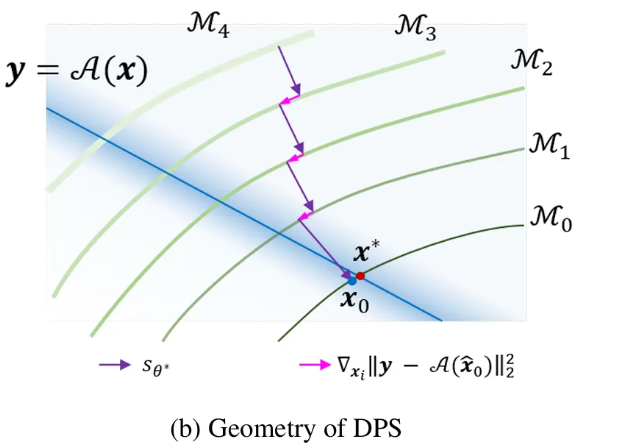
- DPS - $s_{\theta^\star}$ 한 step 이동 후 $p(y|\hat x_0)$의 gradient로 한 step 이동
- DPnP - 단순히 각각의 step 이동이 아닌 proximal term을 통해서 2가지 constraint에 벗어나지 않게 설정
Numerical experiments
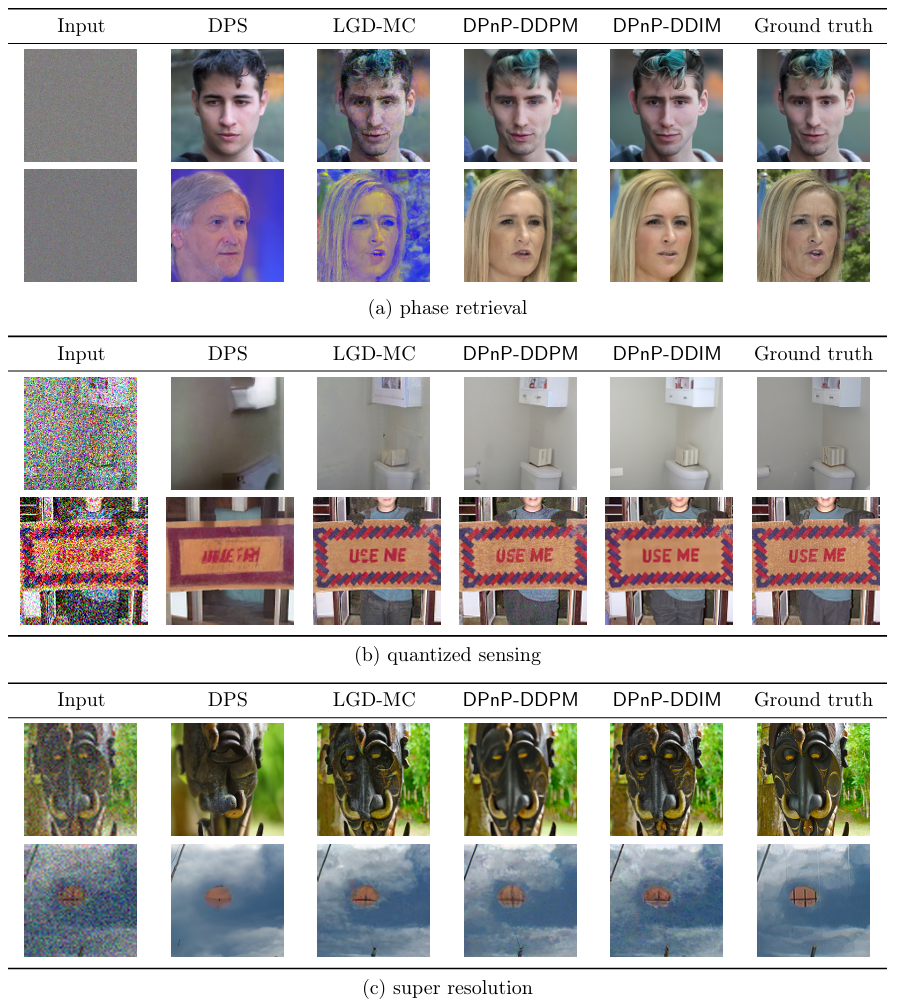
- 3가지 linear and nonliear inverse problems
1. Phase Retrieval
- Fourier 변환된 data에서 위상 정보 복원
- image($x$) & random mask($M$) - 256 x 256
- Fourier transform $\mathcal F$ - $\mathcal F(x)=|\mathcal F(x)|e^{j\phi(x)}$
- Forward operator - $A(x) = \text{mag}(\mathcal{F}(M \odot x))$
- $mag$ - magnitude of a matrix with complex entries
- $\xi\sim N(0,0.2)$
2. Quantized sensing
- low-bit(1bit) quantized version으로부터 image 복원
- Forward operator - 각 channel의 각 fixel에 대해 $Q$ 적용

- pixel $\in[-1,1]$, $\theta=0.4$
- ⇒ channel 별 1bit의 image 생성 (기존 8bit)
3. Super resolution
- row resolution으로부터 high resolution image 복원
- Forward operator - Bicubic downsampling operator(4:1)
- linear operator & $\xi\sim N(0, 0.2)$
[Results]
- DPS: Diffusion Posterior Sampler
- LGD-MC: Loss-Guided Diffusion with Model Carlo approach
- Visual results
- DPnP - linear and nonlinear problems 해결 가능 & SOTA (선명 & detail 복원)
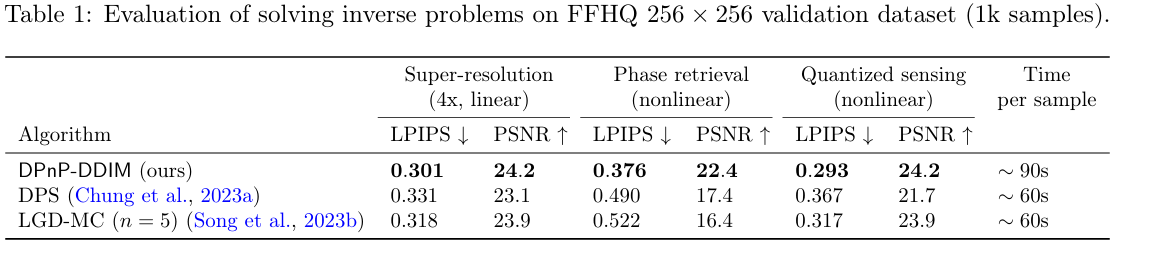
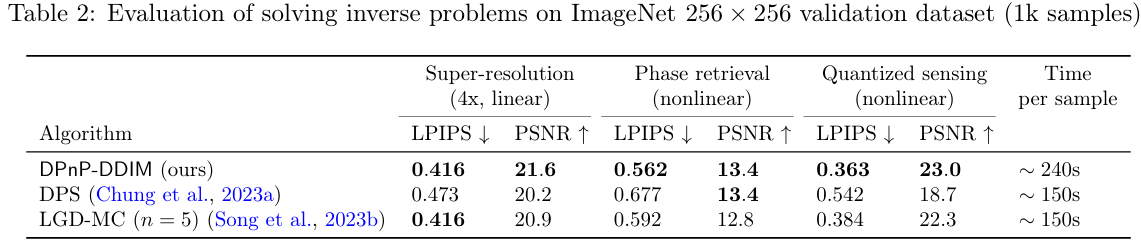
- Performance metric
- LPIPS - Learned Perceptual Image Patch Similarity
- VGG network 여러 layer에서 추출된 feature vector 비교 ⇒ 낮을수록 good
- PSNR - Peak Signal-to-Noise Ratio
- fixel 단위 차이를 측정하는 지표 ⇒ 클수록 good
- $PSNR = 10*log_{10}(\frac{MAX^2}{MSE})$
- LPIPS - Learned Perceptual Image Patch Similarity
- FFHQ - 256 x 256
- 모든 problems에서 성능 우수
- 1.5x computation time 필요
- ImageNet - 256 x 256
[DPnP]
- Diffusion Plug and Play
- Score-based diffusion model의 image prior와 general forward model을 결합하여 posterior sampling
- ⇒ Nonlinear inverse problem문제 해결


